
Team 23:
Overview
Our strategy for the competition was to simply drive forward along our wall, shoot all six balls into our #2 slot, then backing up over the opponents #4 bin and staying there. While this happened to be the winning strategy, our implementation of it was done 30 minutes after the impounding deadline, and thus was lacking in robustness and general reliability.
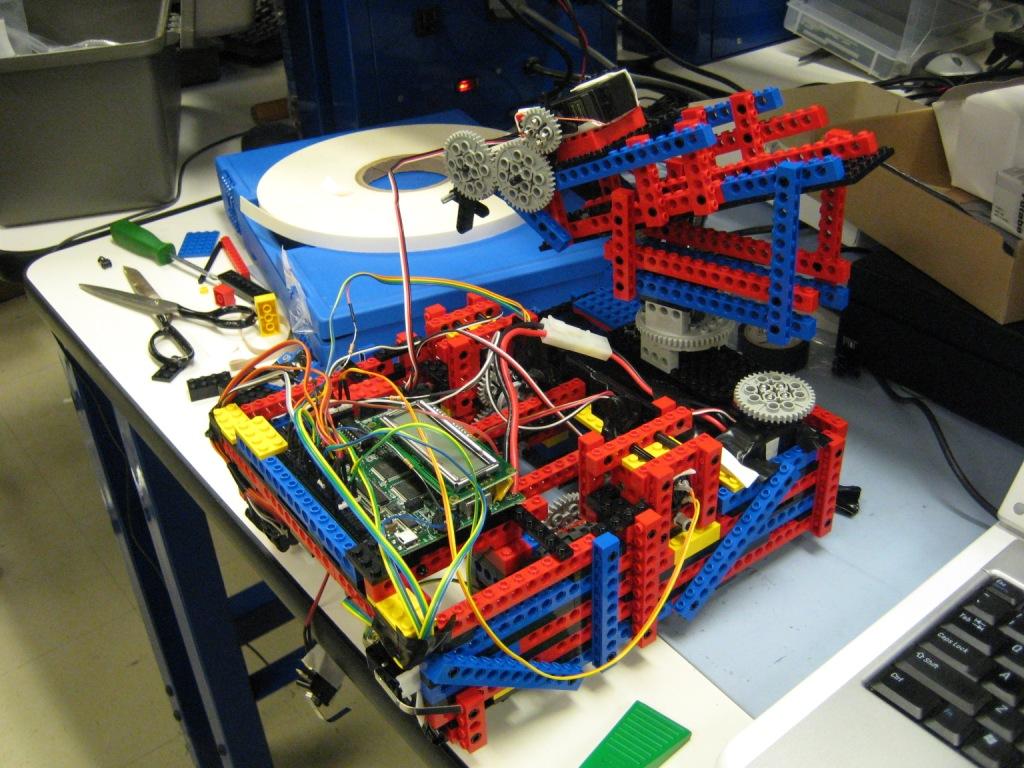
The bot, in all it's glory. The shooter mechanism was especially awesome.
The Experience
Overall, we found the experience of building the robot to be frustrating, infuriating, nauseating, enlightening, and “friggin’ awesome,” in that order. We initially disagreed about whether we should pursue the whole strategy of the game, or choose to ignore some portions of it to increase reliability. By week two, we had settled on playing the whole game, since we had managed to drive straight and turn at angles, and we figured it would be “really easy to pick up the skunk.” Our one-way gate mechanism (under the Happyboard, not pictured) was “borrowed” from Emily’s 2.007 experiences and proved to be the only implementation of such a gate in the entire competition. For some reason, we’re proud of this, despite the fact that we never touched the skunk (well, it touched us, but…).
Needless to say, on the last day of building, we had a non-functional, unreliable robot that could no longer drive straight or make turns. It also did not have a shooting mechanism or a hope of coming together in time. We implemented the gyro sensor that morning and with it, a nearly complete rewrite of our code. There are shreds of the original plan commented out, but we had no chance to test these for reliability in the end. The shooting mechanism did turn out to be cool, though.

John, hard at work pushing a gear onto a rod. This picture was taken 30 minutes after the impounding deadline.
The Team
Emily Li – A mechanical engineering student with a zest for finance and less of a zest for mechanical engineering. She will be doing consulting next year. Enough said.
All joking aside, we were actually happy with the overall mechanical design, and especially happy that viewers were able to see our shooter operate (after we became the only team skunked during the whole competition). Perhaps by virtue of her small fingers, she did an excellent job stabilizing the robot and mounting components.
John Healy – A biological engineer who had no business entering the competition, but decided it might work as an “application” of his abilities. He will be doing consulting next year. Enough said.
He was primarily responsible for the programming of the robot, which admittedly turned out to be sub-par and rather embarrassing. He will insist, however, that this is mainly due to the poor reliability of components mounted by Emily. He also insists that both the rotating turret and ball release mechanisms were his ideas, but were lovingly ripped off by the project’s “mechanical engineering leader.”

The team, enjoying themselves during Week 1. We could never enjoy ourselves this much after 6.270. (Er, just kidding. Really.)