Final Hardware Design
From the very beginning, Maddy and I knew we wanted to make our robot smaller than the other groups were making theirs, in an effort to give our robot the advantage in speed and maneuverability. This required us to be a bit more conservative however with our functional designs.
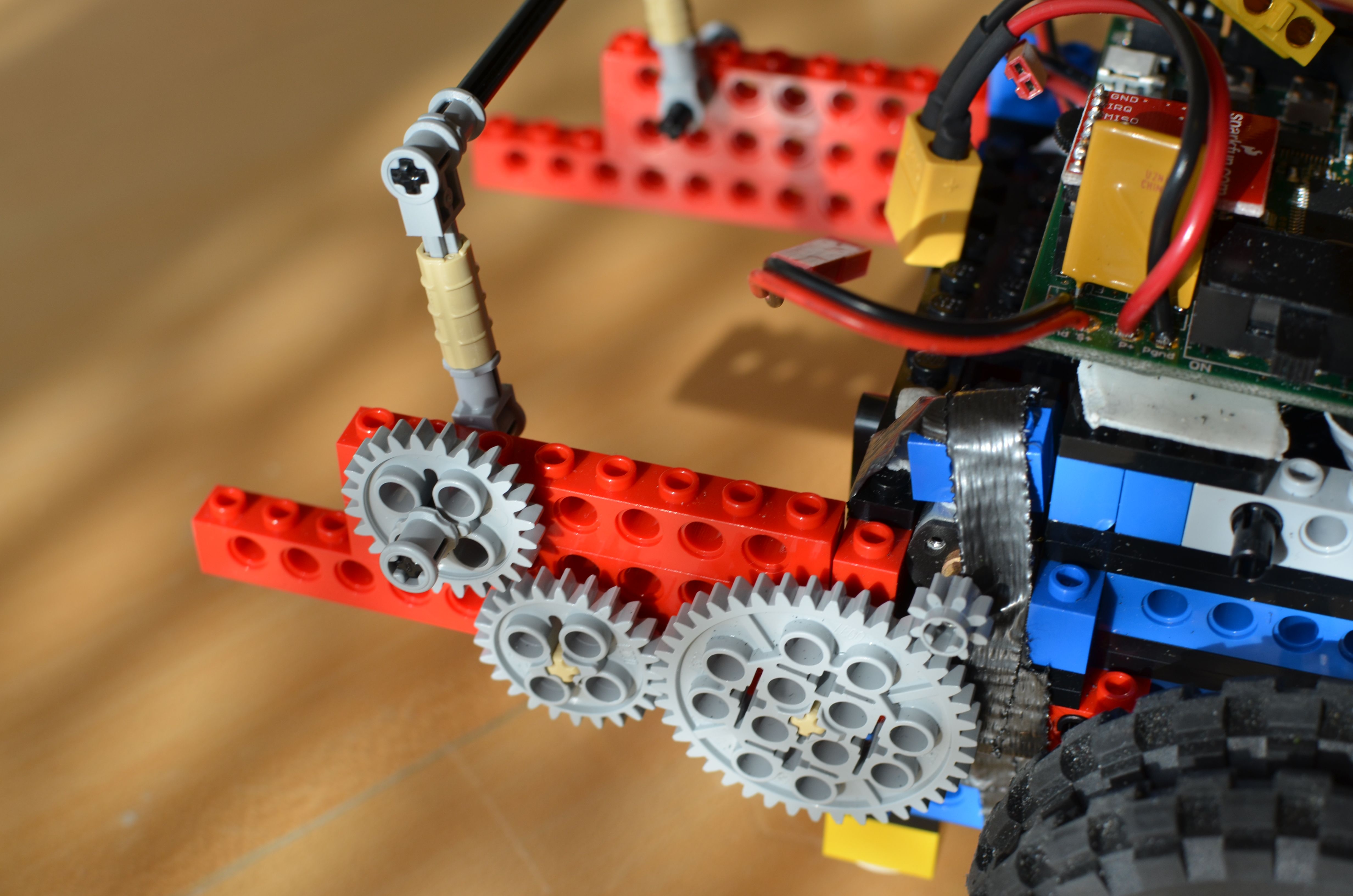
We ended up with a two-wheeled final design, with a drag strip in the back for stability as well as emergency wheels to keep if from getting stuck on walls. To this base we added a three geared vertically mounted motor in the back connected to a wheel, to turn the gear boxes (Not shown). Our lever-pulling device was conversely mounted in the front, and consisted of a bar they was spun by a paired down horizontally mounted fourth motor. Finally, we added a simple ramp held on the top by bracings that would catch the dropped balls, along with a simple gate mechanism at the end of it controlled by a servo (not shown). All of these tools were highly simplistic in theory, but were greatly complicated by the size constraints of our robot, as making each component more compact also made them more fragile. In the end, this along with the actual lightness of our bot is what did it in in the competition, as the gearbox-turner ended up slipping and then breaking because the force it put on the box was greater than the bot's friction against the ground.