THE PUNISHERS
Team Members: Jonathan Lui, Tanya Liu, Xinyi Zhang
Robot Name: Monty
About our Robot:
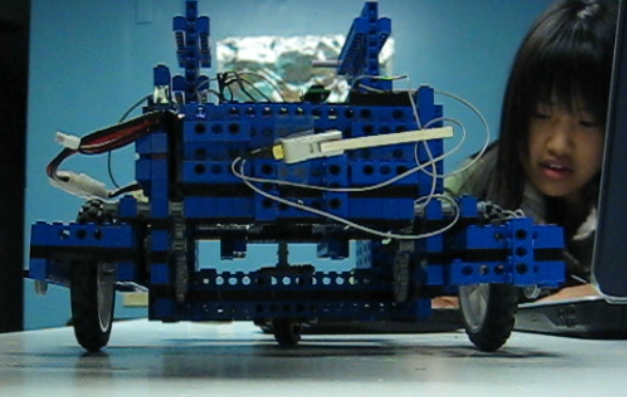
Above is our robot Monty. He is a black and blue machine that contains two motors for a differential drive. The gear ratio for both wheels is 1:81. He has a castor wheel at the back that we use for balance of the robot. Monty is fairly light since he is supposed to move as quickly as possible.
General Strategy:
Monty is designed to be very agile so he can drive over 4 golf balls as quickly as possible and then push them across the rift. Initially we were going to build a ramp for the back of Monty in order to lift tennis balls. However, we had difficulties with Monty’s wheels that caused us to defer the ramp.
Difficulties Encountered:
We started off a little slow with building the robot which costs our team heavily. Halfway through the second week we finally finished our chassis. We mounted the motors and tested our robot out. The wheels would spin very well when Monty was held in the air. However, when we would put him onto the ground the wheels would simply stop spinning. We also had several problems with keeping our robot from tipping forward because it was front heavy.
Overcoming Difficulties:
We never quite did figure out why our wheels would stop spinning when our robot was put on the ground. Sometimes the robot would do what it should do and sometimes it didn’t. We asked the TAs what the problem was and they could not figure it out either. We all figured that it was due to the axle bending. Both wheels were simply held by a long axle. Hence, our team decided to add an extra support by connecting the axle to the body. Initially this solution seemed to work but shortly after the wheels would stop spinning again when Monty was put on the ground. In order to deal with Monty tipping forward, we simply added a castor wheel at the back. We began the process of building our ramp which added extra weight to the back of the robot and solved our problem.