|
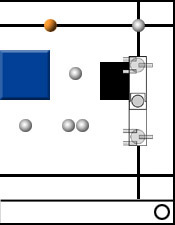
After the start light fires, U.B. spins around the start location until it reaches the orientation at right (which we called "South"). Then it unfolds. |
|||
|
|
|||
|
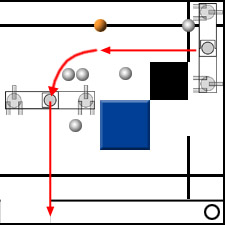
Then, U.B. moves forward to the middle of the start location using shaft encoders to measure the distance. Finally, both wheel assemblies spin sideways, and the robot drives into the ball between it and the trough, knocking it in. While it moves, it measures the distance to the wall with the shaft encoders. After knocking in the ball, it moves back to where it came from. |
|||
|
|
|||
Once at the center, U.B. moves forward and tries to detect the barrier with push-button sensors. If a barrier is detected, the code switches to Plan A or B. If not (ie: when the barrier is in either far position), the code times out and chooses plan C. All plans begin with U.B. pushing against the back wall once again, then turning sideways and driving up against the wall. Then they differ, as follows: |
|||
|
|
|||
|
The only problem is that we knock in a ball of the other color; but if we get in all of our balls, this shouldn't matter unless the opponent's robot also pushes in a lot of balls. Ironically, this happened the be the most frequently chosen location for the barrier by other teams. Maximum possible balls: 6 + 1 opponent |
|||
|
|
|||
|
Maximum possible balls: 4 |
|||
|
Maximum possible balls: 5 |
|||
|
|
|||
|
After every Plan, U.B. drives along the trough lip toward the opponent's side, hopefully blocking their access to the trough. It would probably be too late to stop anything, but who knows? |
 Unexplained
Bacon is a 2-foot Lego wall that drives around and push balls around.
The first part of the contest, however, is orientation. The robot has
a sensor head hanging down which receives the start light flashing and
determines the side and orientation.
Unexplained
Bacon is a 2-foot Lego wall that drives around and push balls around.
The first part of the contest, however, is orientation. The robot has
a sensor head hanging down which receives the start light flashing and
determines the side and orientation. Once
unfolded, the robot moves backward until it hits the back wall. This helps
it align properly, as the orient/unfold process is unfortunately far from
perfect (see results).
Once
unfolded, the robot moves backward until it hits the back wall. This helps
it align properly, as the orient/unfold process is unfortunately far from
perfect (see results). 
 Plan
A: U.B. drives forward,
catching the two balls nearest to it, then turns around the barrier and
drives straight toward the trough with the rest of the balls.
Plan
A: U.B. drives forward,
catching the two balls nearest to it, then turns around the barrier and
drives straight toward the trough with the rest of the balls.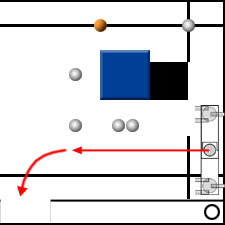 Plan
B: U.B. moves back
to the trough side of the board, then drives forward to catch the two
balls right in front of it. While moving forward, it turns about it's
left wheel toward the trough, catching the third ball and pushing all
three into the trough.
Plan
B: U.B. moves back
to the trough side of the board, then drives forward to catch the two
balls right in front of it. While moving forward, it turns about it's
left wheel toward the trough, catching the third ball and pushing all
three into the trough.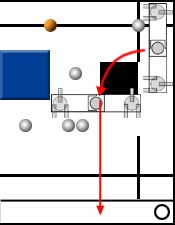 Plan
C: U.B. immediately
sweeps around and drives toward the trough.
Plan
C: U.B. immediately
sweeps around and drives toward the trough.