|
|
The synchro-drive approach has been rarely used by the previous 6.270 teams because of its mechanical complexity. Each wheel of such a chassis has the ability to be steered and driven independently of the remaining wheels. This allows the vehicle full freedom to translate in any direction or to rotate to any angle in place. In fact with such a configuration it would be possible to design a robot that could translate and rotate simultaneously. The superior maneuverability of such a robot would mean that it has no inherent front or back, and can move equally well in all directions. 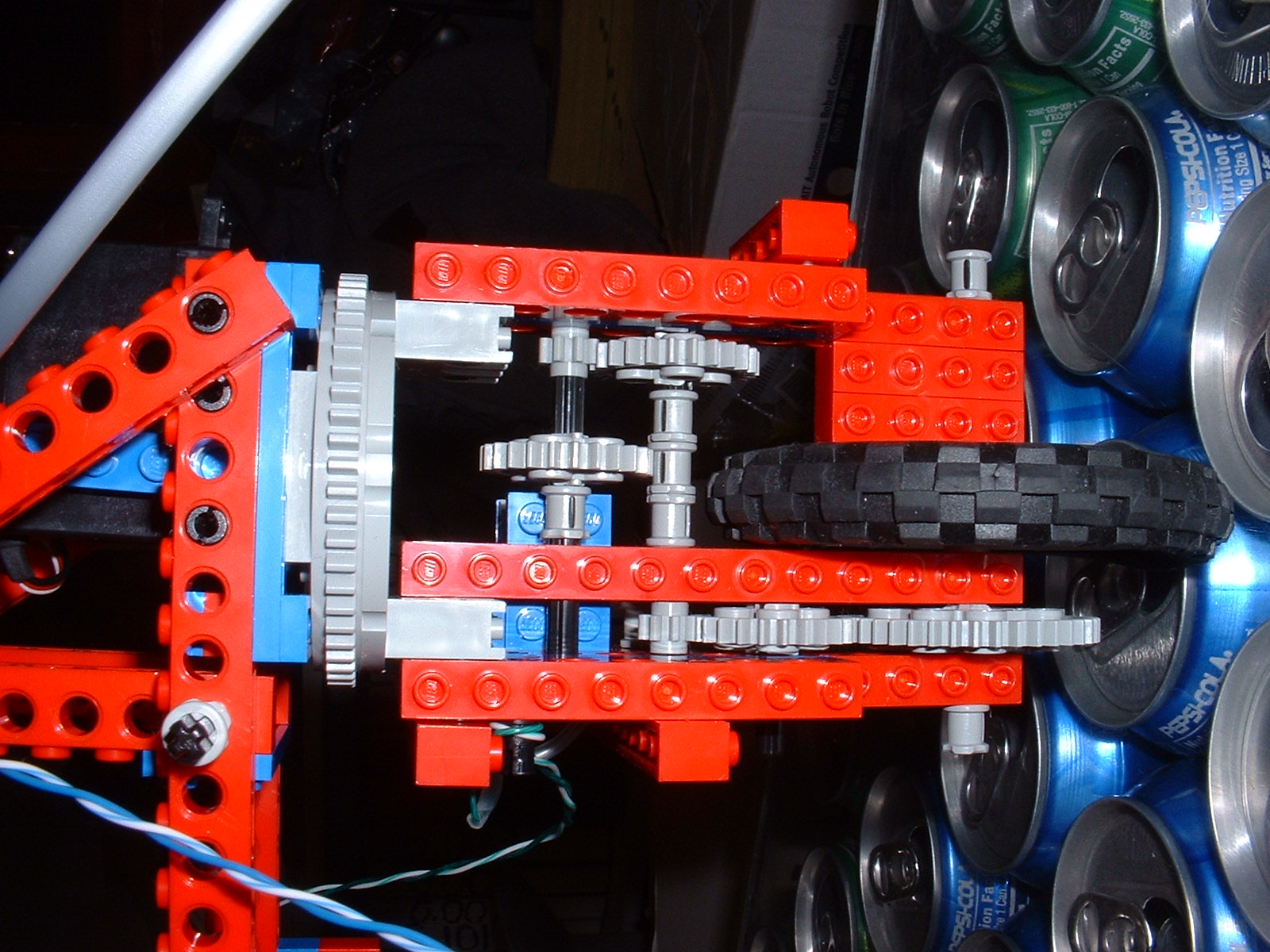
Although a synchro-drive chassis is far superior in maneuverability to other possible designs we had to overcome formidable mechanical difficulties before we built a robot that satisfied our needs. We quickly decided to build a three wheeled robot in order to save materials and because we were limited by the number of servos that we could use to steer the wheels. With the available LEGOs we had to use the turntables to provide a platform for the wheels and the associated gearbox and motor. 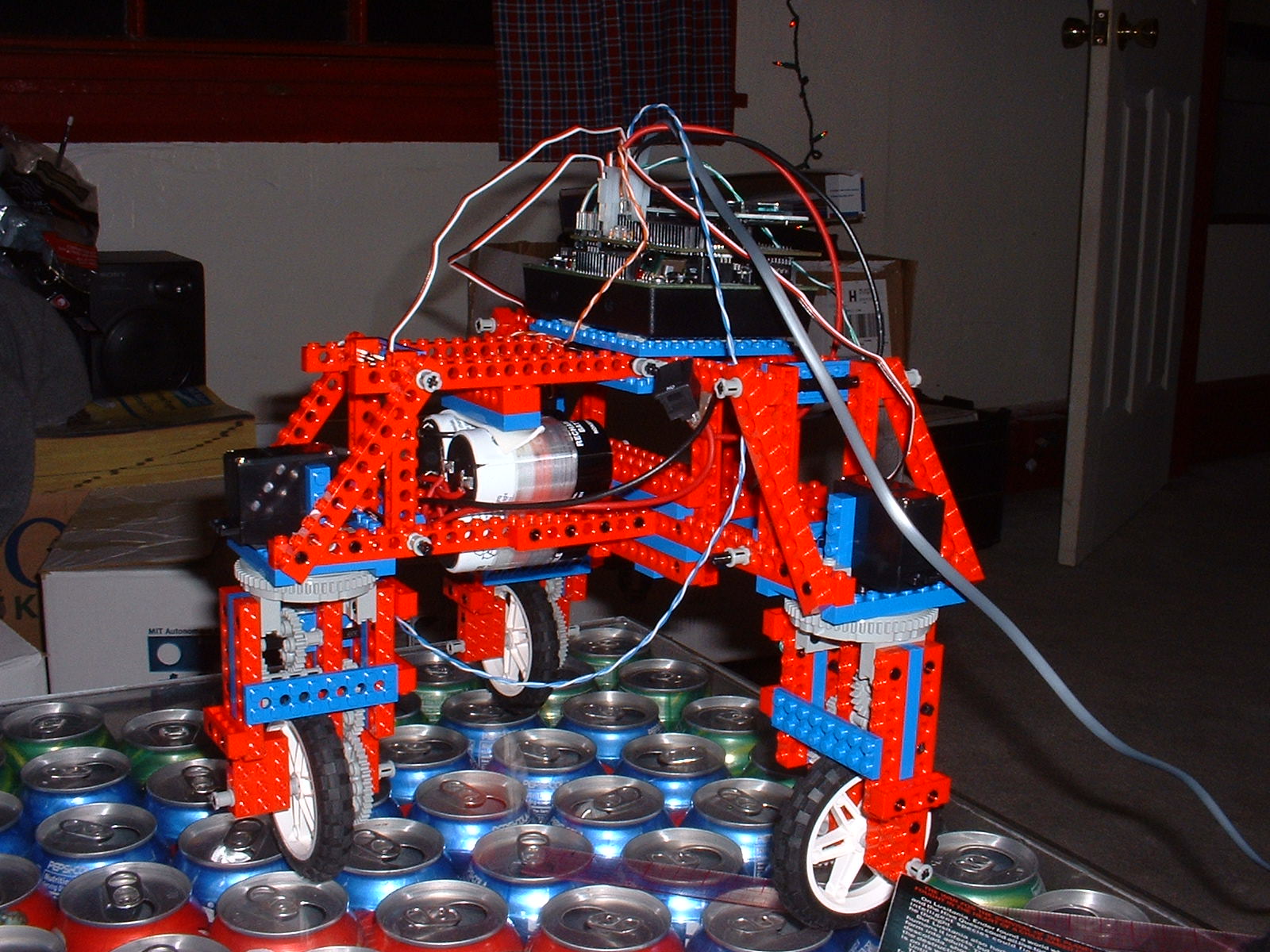
Since the entire gearbox and motor assembly must be able to fit inside a cylinder whose base is no larger than the dimensions of the turntable, we had to place most of our components in a manner that resulted in a rather tall structure. Although there is nothing inherently wrong with having a tall robot, we quickly realized that even a slightest collision with an obstacle such as the wall or another robot, would result in the turntables coming apart. This was certainly the weakest aspect of the early versions of our robot. After some deliberation on how to strengthen the robot we decided to use vertical bumpers that would absorb the energy from the collision and keep the turntables intact. However once we tested them we concluded that the bumpers were not strong enough, did not extend far enough downward, and partially restricted the rotational motion of the three wheels by catching the motor wires. Following another brainstorming session, and some advice from a good friend we decided that rather than having the chassis sit above the wheels we would place it close to the floor. In such configuration we would not need to utilize any additional bumpers, and the structure would be quite rigid. The center of mass of the robot would also be close to the floor aiding slightly with the stability. |

![]()

![]()
