| TEAM 3 |
6.270 - Autonomous Robot Design Competition - IAP 2005 |
Home | Strategy | Design | Code | Results | 6.270
The Design
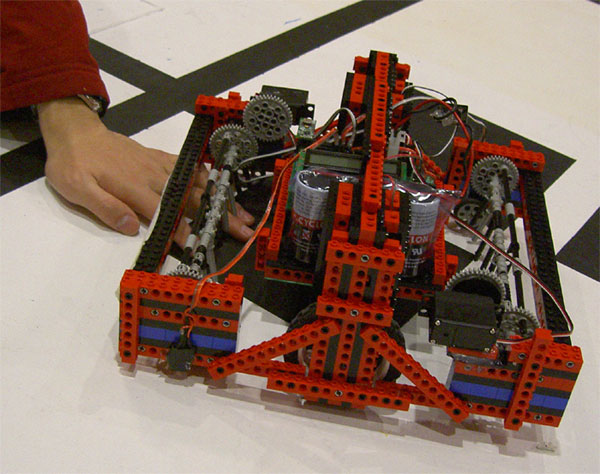
IR Sensors - Three sensors were used on three corners of the robot to determine orientation. The starting position on the game board have different colors on the ground, and knowing the color below three different corners of the robot at the starting location will allow us to determine which side of the board it is on and which location it is facing.
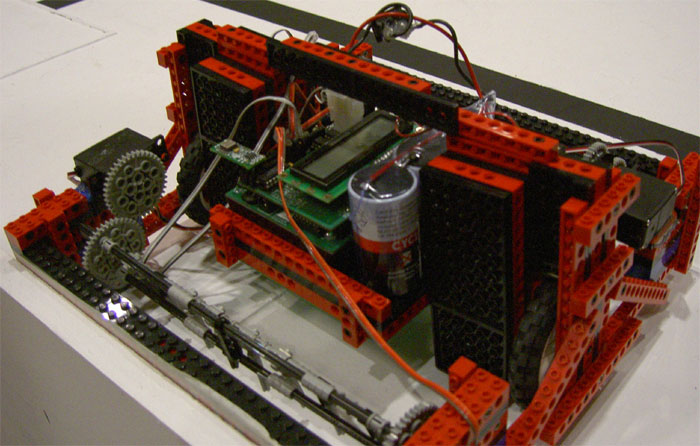
Double-sided - We decided to make our robot look identical from the front and the rear. The advantage of this design is that the robot can pick up balls with less turns and therefore less errors. For example, if there are balls in front of and behind the robot, it can pick them up by driving forward then backwards. Also, because the location of the balls are known, we can find a route such that all green balls are in the front compartment and all red balls are in the back compartment. This gives the robot the ability to sort balls. Originally, we had a ball sorting mechanism, but that proved to be inefficient because it is difficult to quickly funnel many balls through the mechanism and still have enough space to store a large number of balls.
One way gates - Both the front and the back of the robot is equipped with a one way gate. This is created using an axle holding up freely rotating Lego pieces. A servos can move a rod to prevent the gate from opening in one direction. So when we want to store balls, we can make the gate only allow balls to move inward. Balls can be placed into a scoring area by simply driving over it, changing the gates to only allow balls to come out, and then backing away. The robot can vote similarly by changing the gate to only allow balls out, driving backwards to release the balls, and then driving forward to push the balls into the voting area.