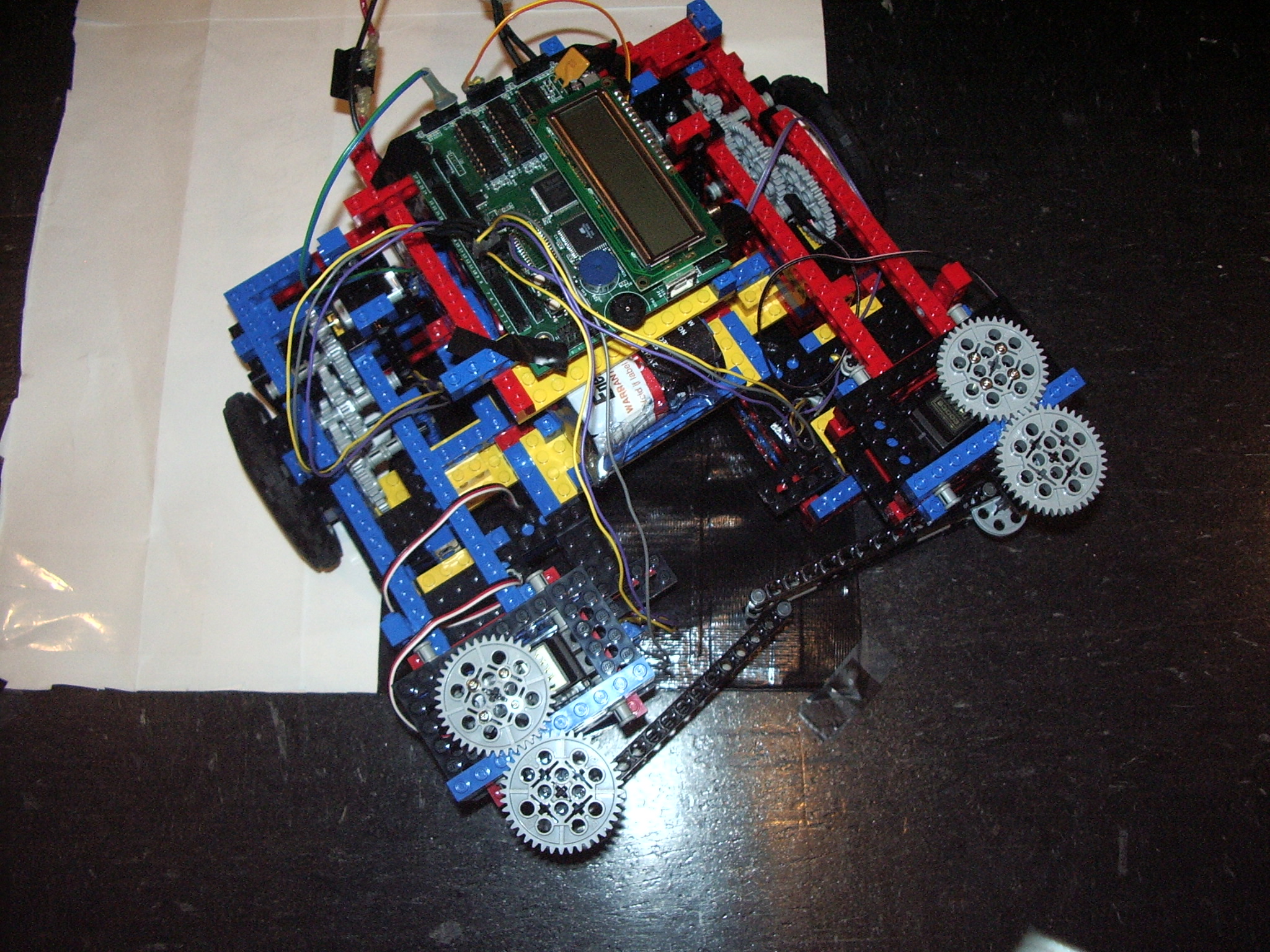
This is what our bot looked like at 11:41pm on 1/25/06, the night before impounding. Features to note on our robot include the two back wheels, each driven by a motor on a 125:1 gear train, and two servos screwed to 40-tooth gears for driving our (then flimsy) robot arms. The robot is sitting on our test square (finely hand-crafted from a Macy's bag and duct tape) which we used to test the orientaton code. The purple and yellow wires connected to the Happyboard are for IR phototransistors, which we used to orient our robot.
This is a photo of our Happyboard. This fantastic piece of electronic hardware was developed by Ross Glashan. Due to poor soldering on our part, it gave us quite a bit of trouble during the first few weeks of the contest. Here it is waiting as we download new code for our robot. Look at it glow!

And this is our final bot, just before impounding. Notable changes: we removed the castor wheels and replaced it with a braced peg leg in the center of our robot, made the arms more sturdy, and added bump sensors to them to sense when the robot hit a wall in a corner territory (signaling it to drive backwards).

And so it was time to say goodbye to our baby. See how it reaches out for one last hug? Feel the love.