| |
6.270 Autonomous Robotic
Competition
|
IAP 2003
|
Strategy
Hit hard, hit fast, hit often.
(Admiral William Halsey)
Primary thoughts
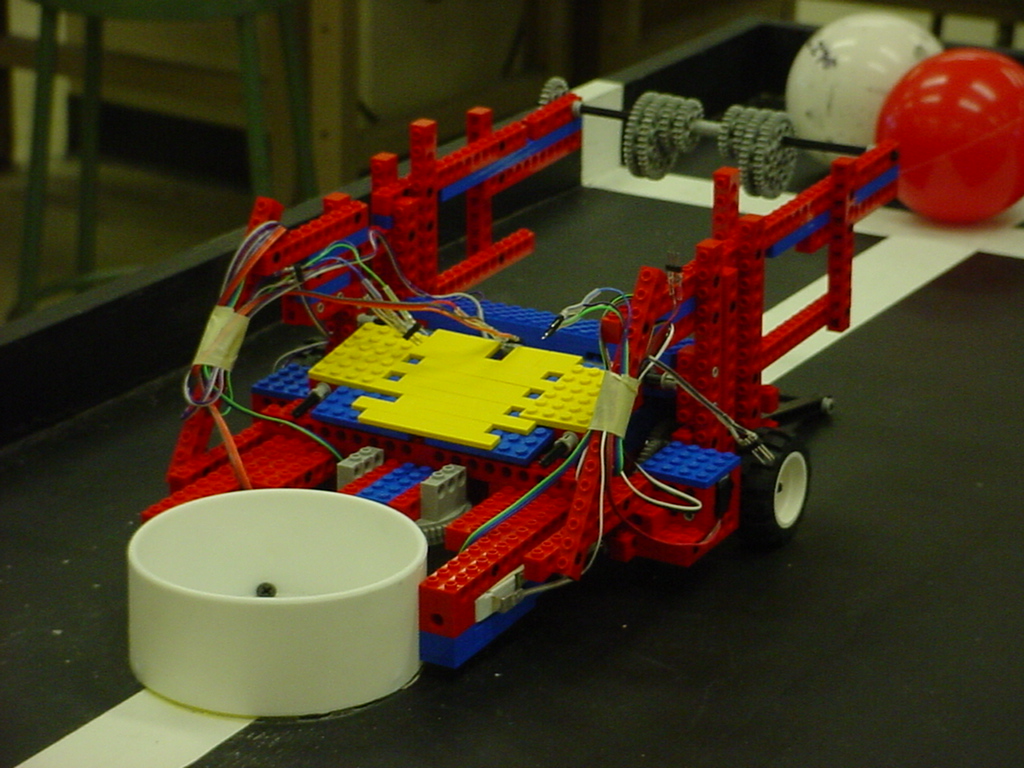
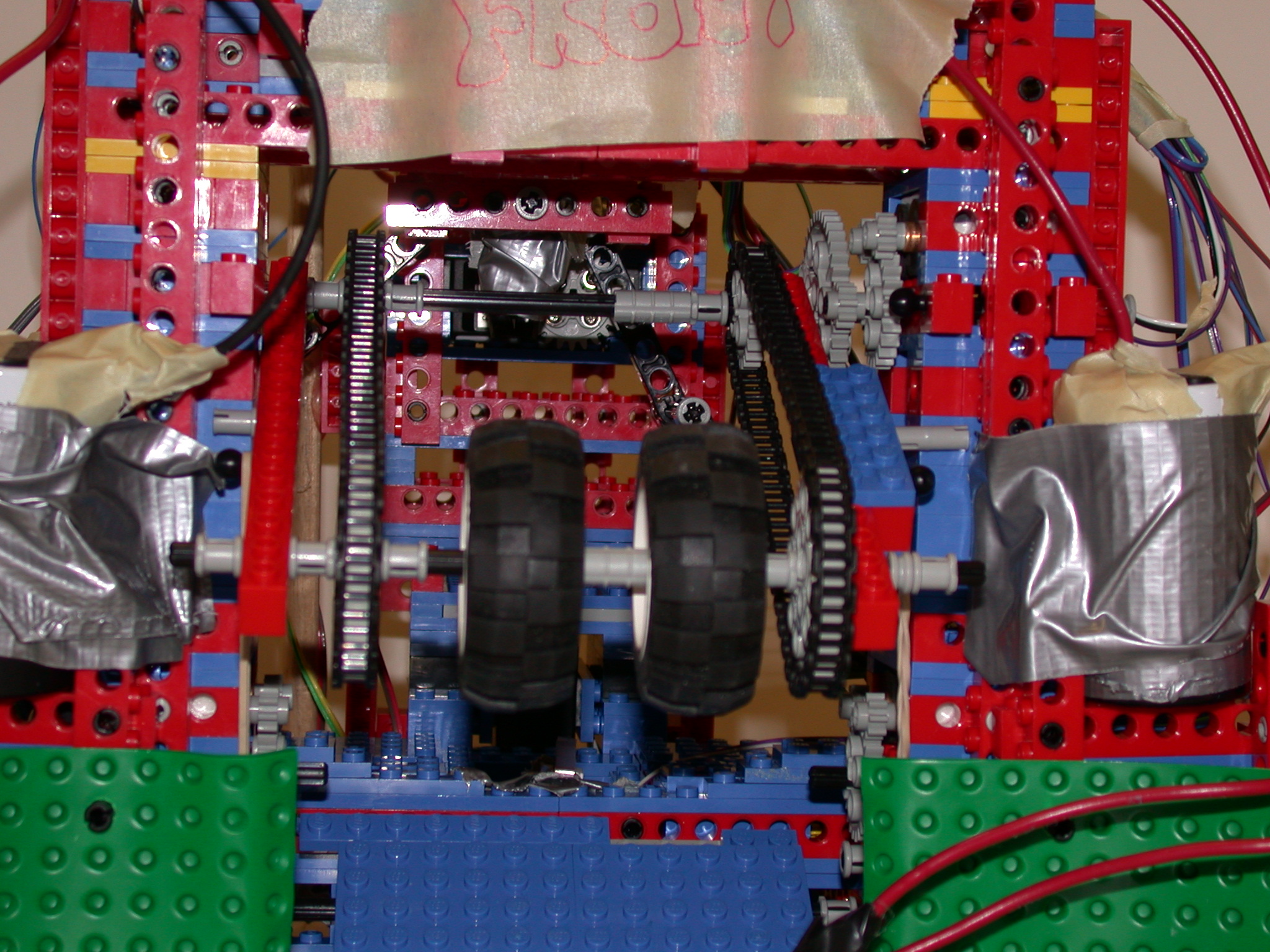
We decided at the very beginning: either everything or nothing. Scoring to the lava pit cold at least let us tie, is not win. If you could get to the lava island, ou could not lose. Our idea was always based on this fact; we had a bunch of diffrent possible scenario of this plan. Getting a ball to the lava pit, then guarding it, or going for another one, attacking other robot, etc. An essential requirement was to get to the lava pit as fast as possible; thus our small gear ratio and two motors on each wheel.
Beginnings of the strategy
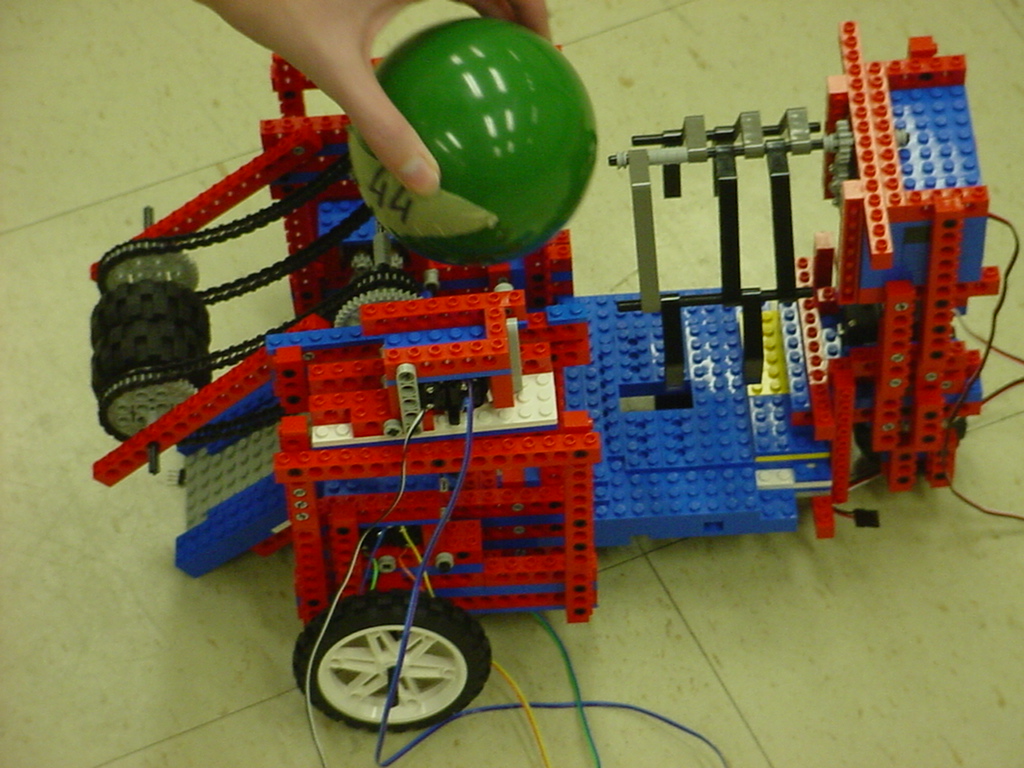
We decided to use the front to suck up the balls and then drive backwards down the hill and turn so that we would reach the lava island facing the back and thus the ball could be deposited from the back.
Strategy: the top
Our robot started nicely but unfortunately turned too much and got a little stuck on a wall when climbing up to the top plateau. Even timeouts were not able to help :( Our opponents did not score either. Double loss. One more loss to go...
Final outcome
At the very end we had to change it because our ideas required too extensive coding, for which we did not really have time, argh! Well, in the end it turned out that just driving to get one ball and bringing it to the middle plateau is good enough judging from our opponent's progress. This is how we settled down for the final round.
|
|
|