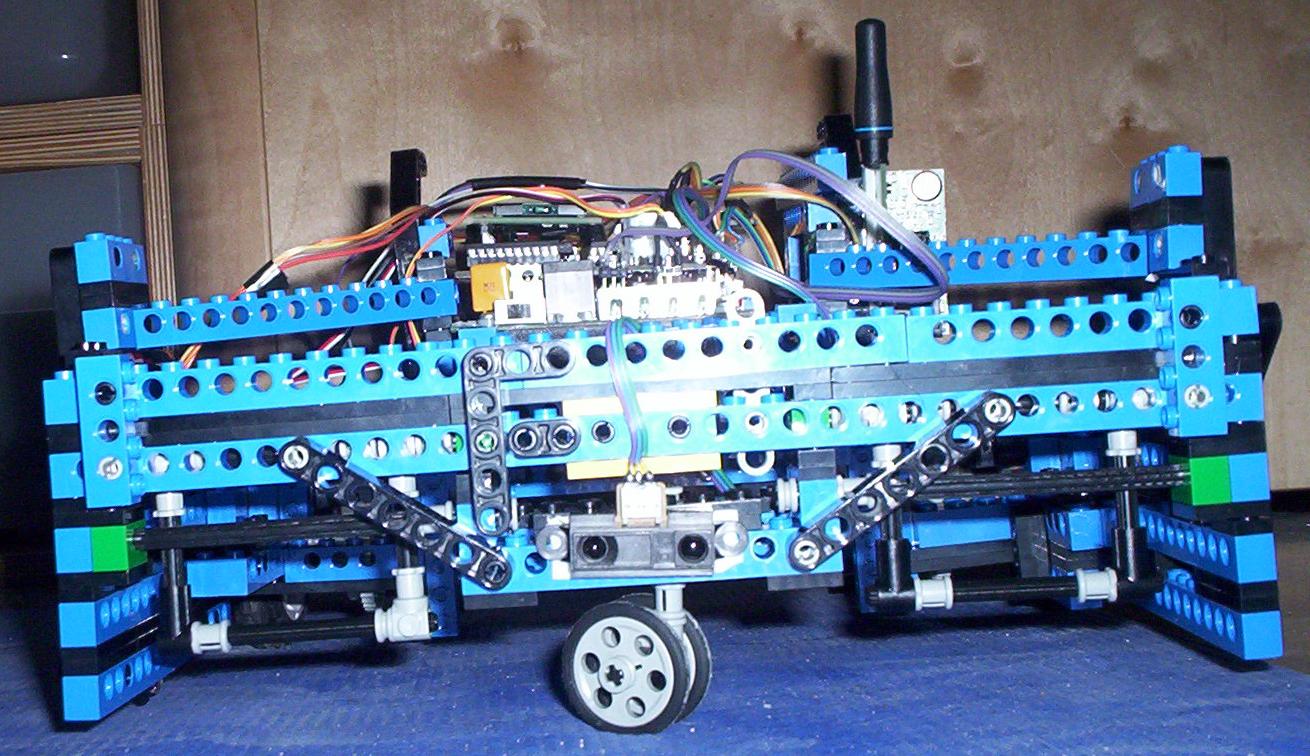
Robot Design
The robot had one distance sensor in the front. Three phototransistors were located on one side of the robot, helping determine which team (1 or 0) the robot belongs to. The robot had the two back wheels driven by motors and a third passive wheel in the front dragged by the robot. The robot had a funnel on one of the sides to guide the balls. The two ends of this funnel had bump sensors on them. Finally, a gyro was placed on top of the robot to guide it when driving in a straight line.