| The Team |
| The Strategy |
| The Design |
| The Code |
| The Results |
Design
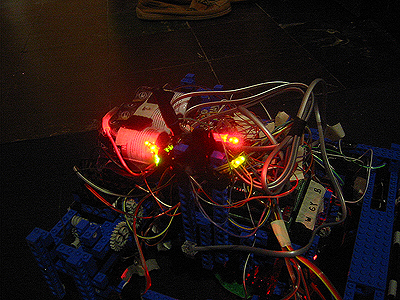
Our robot's design is pretty sweet. It uses most of its 1'x1' ground real estate for funneling, sorting, and collecting balls. The color sorter is the coolest thing ever. It was the only part of our robot that ever worked. And even it didn't work with all the ambient light in Kresge.
From this angle it looks like it's going to eat you. And then sort you into a bin.
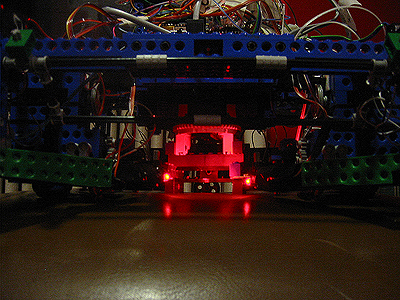
Jay did our drivetrain. It's differential with a 45:1 ratio. It uses a servo-mounted castor to help steer.
Until about 2 days before impounding, our robot always listed to the left. Matt thought it was because Jay screwed up the left wheel. Jay wasn't so sure. It turned out it was because Matt didn't calibrate the castor's 'straight' position so it was always few degrees off. After Matt fixed it, the steering was awesome.
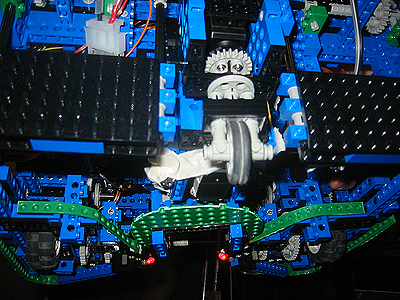
We had to make lots of important decisions while building our robot. Fortunately, we had a well-established process in place to resolve these design decisions. This is Matt and Julia deciding which bin should hold the green balls:

We also developed a proprietary navigation system.