|
|
| Overview |
 |
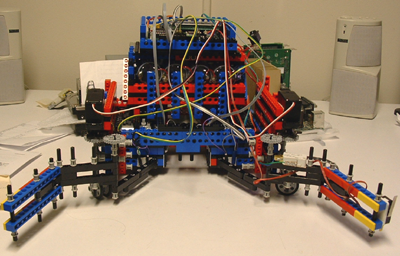
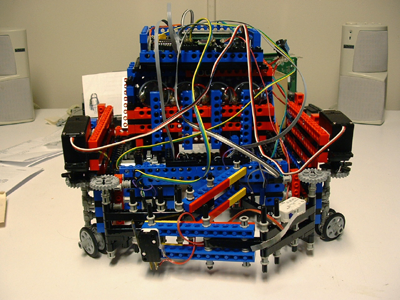
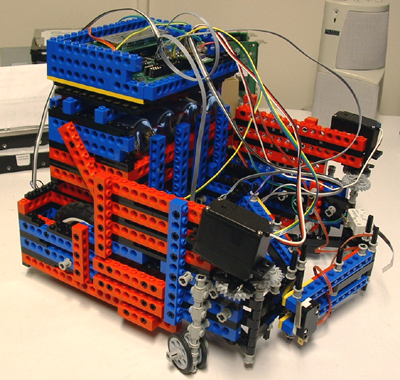
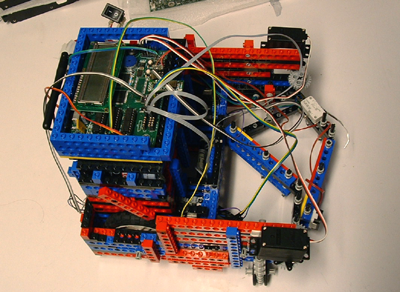
| Designed to somewhat mimic a spider, our robot features two arms (pedipalpi), a ball gate composed of two axles (fangs), 4 IR sensors for line following (spider eyes), and a large abdomen =P. This of course was unintentional, and we only take credit for it after the fact =). |
|
| Details |
- Gear Ratio: 25:1
- Motors: 2 (one per wheel)
- Wheels: 2 main wheels, 2 shopping-cart-wheels
- Drive: Rear-wheel
- IR Sensors: 5 (4 front, 1 back)
- Pressure Sensors: 2 (both on one arm)
- Servos: 2 (one for each arm)
- Gyro: Yes
- OS: JoyOS v1.05c (basically 1.04)
|
|
| Design |
Most of the weight of the robot is situated on the rear larger wheels. These larger wheels are powered by 2 motors (one motor for each wheel) and each has its own gear box with a 25:1 gear ratio. The robot is low enough such that there is no danger of it tipping over. In the front of the robot there are two shopping-cart-wheels that keep friction down to a minimum but allow the robot to remain upright and turn easily.
Two arms are connected to the front of the robot. They overlap eachother when closed, but span over 15" when opened. One arm contains two bump sensors: one for when the arms are closed, and one for when they are open. When open, the arms help guide balls into the ball gate and score zones. When closed, the arms prevent opponent balls from entering the ball gate.
Four sensors placed on the sides of the ball gate are used for line following. The extra sensor in the back is used in combination with the four in the front to determine the proper orientation when a round begins.
|
|
|
|
|