
Our Robot
Robot
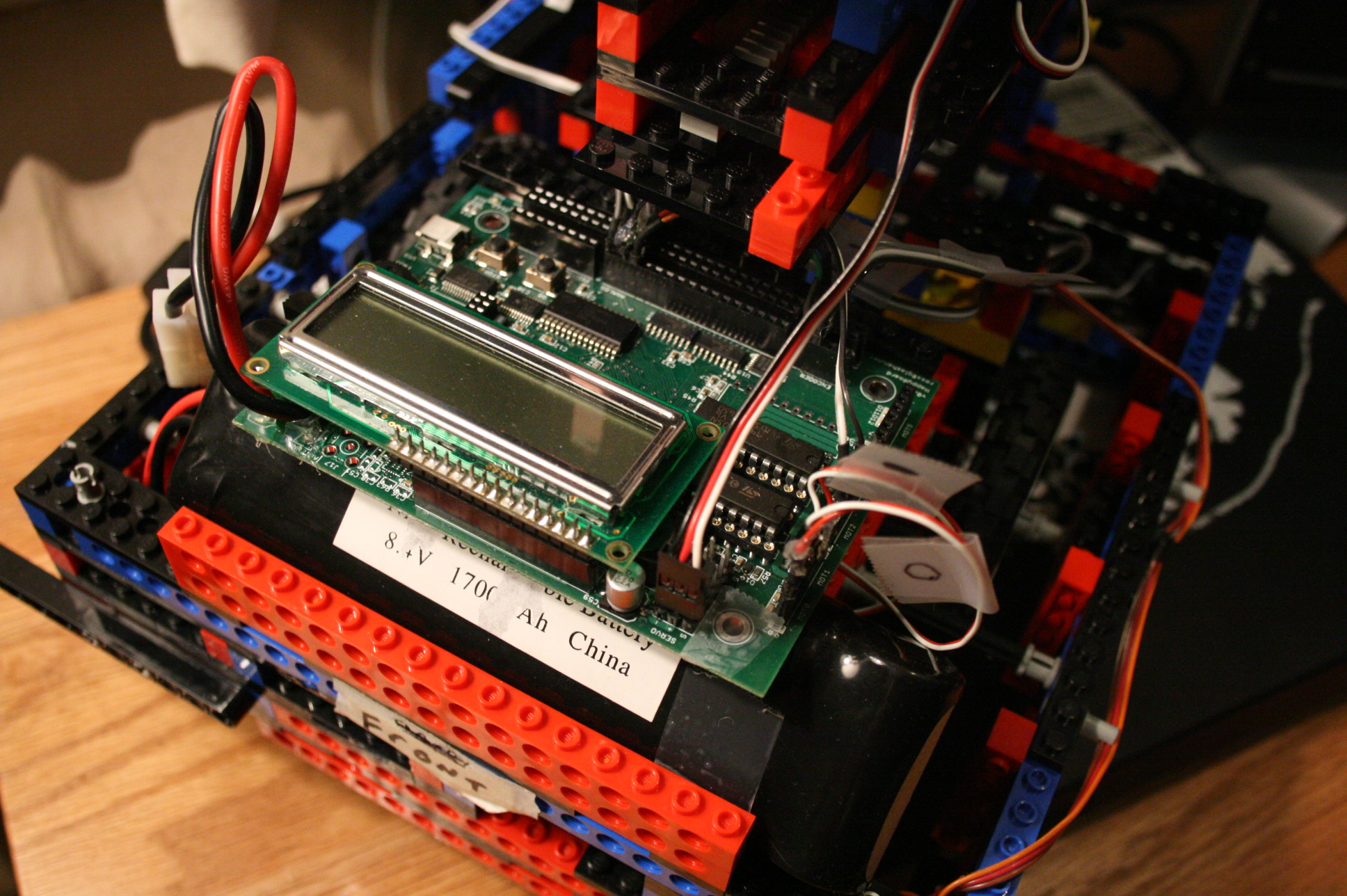
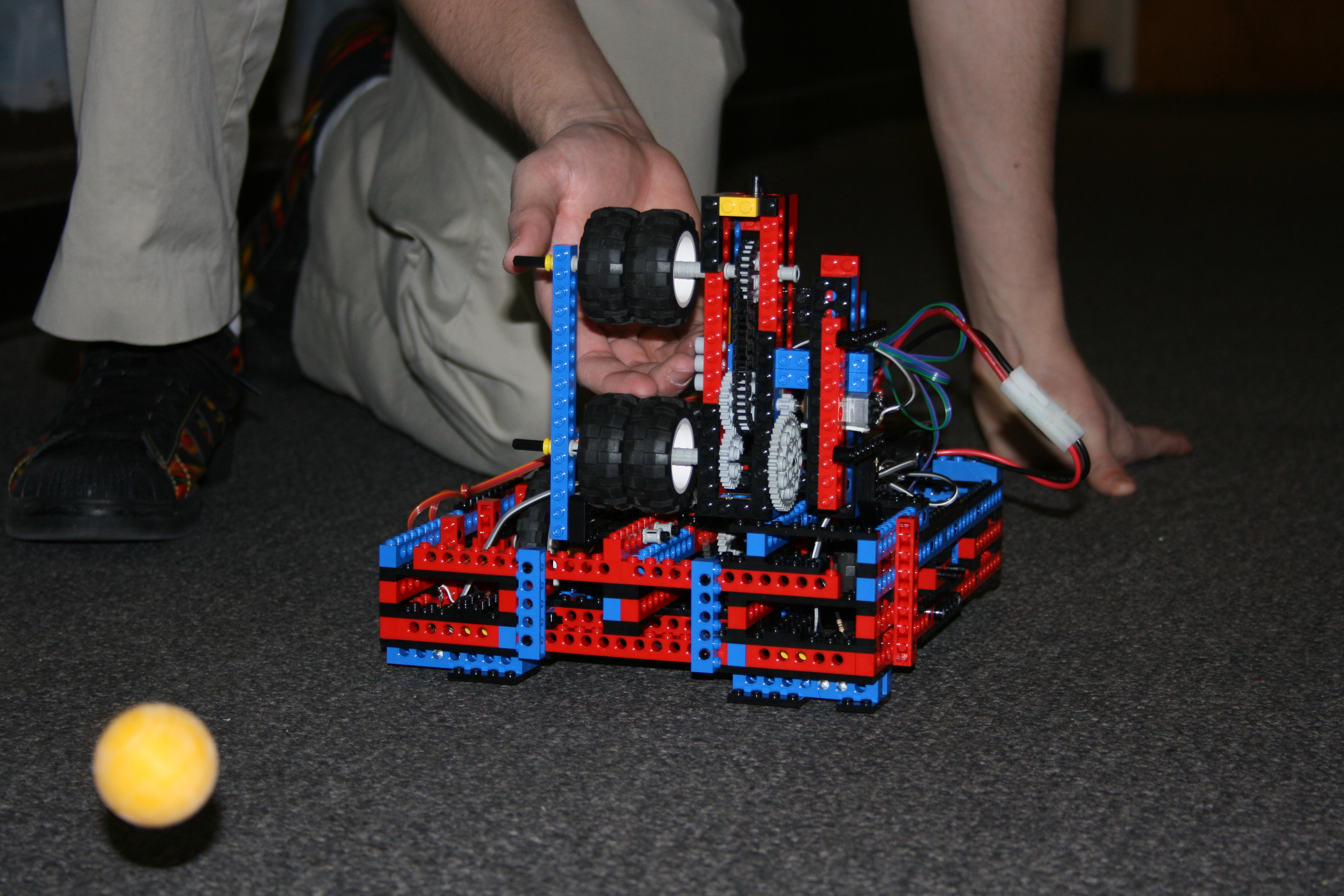
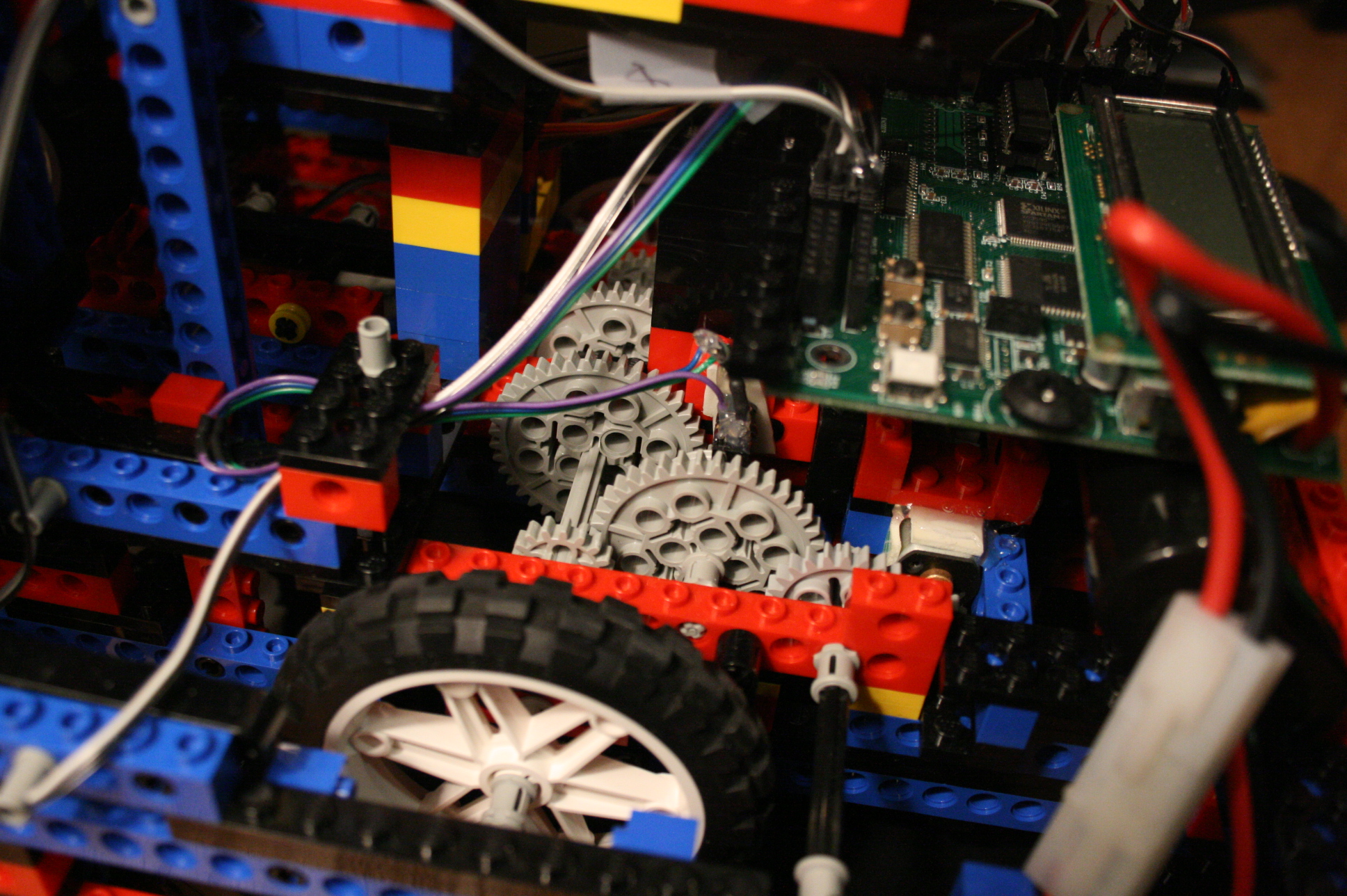
The three main parts of the robot are the drivetrain, the sensors, and the shooting mechanism.
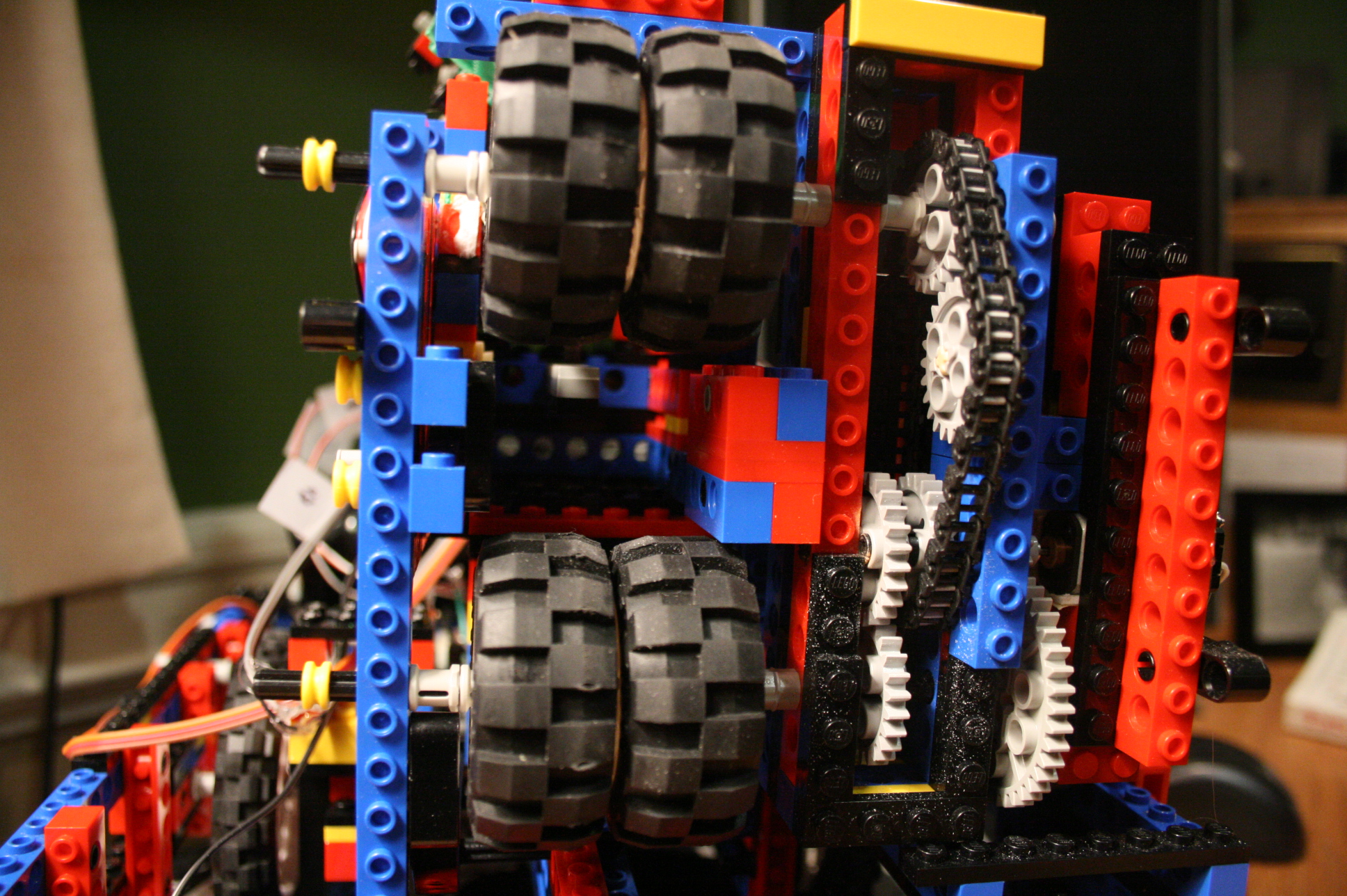
For the drivetrain we have a differential gearbox that spins when the wheels aren't rotating at the same speed. We have a mechanism to lock it when we want to go straight, and let it free when we want to turn.
For sensors we have three IR LED/phototransistors and two shaft encoders. The IR sensors are used to uniquely determine the robot's starting side and orientation. The shaft encoders are used to drive straight and for turns and pivots.
The shooting mechanism works as follows: The 6 balls are stacked in a hopper on the top of the robot. In front of the hopper there are four vertical spinning tires. A plunger, controlled by the servo, pushes the balls forward into the spinning tires which launches the balls out, like a tennis ball machine.

Strategy
Our strategy is simple yet effective, a choice blend of offense and defense. Our key strategic insight was that blocking the opponent's 4 would significantly decrease their scoring ability, while not necessarily keeping us from scoring in our 4. There are three main phases in our robot's life. First, it has to determine its orientation. Next, it has to navigate to the opponent's 4 goal and block it. Lastly, it has to try to shoot the balls into our own goal across the board.
Once we determine our position and orientation we simply rotate our robot to move along the line toward the opponent's 4 goal. To get to the goal we rely on the encoder count. Once we're near the goal, we pivot toward the center goal.
The robot is now in a fine defensive position, blocking the opponent's 4 goal. Now we begin the offense by shooting our balls across the board into our own 4 goal. Since there was a chance the opponent's robot could be pressed up against ours, we thought lobbing it slightly over the robot would be good. On the other hand, keeping it low is probably a more accurate and reliable shooting mechanism, but at a greater risk of having our balls blocked. We also considered trying at the very end to turn slightly and shooting one ball toward our 1 goal, just in case our 4 is blocked.
Independent of what their strategy is, our combination of offense and defense should beat most strategies without going to the tiebreaker. We feel most opponents will try to drive up and deposit their balls in the goals. By blocking their four, we limit how high their score can be. But if we still manage to shoot in most of our balls into our own 4, then even if they put their balls in their 2, we still win. An opponent who uses our strategy faster, or somehow shoots their balls into their 4 before we can position ourselves is dangerous, though.