|
|
Robot and Strategy
OMG! Pirates1
Strategy
Our strategy was simple. We have always believed, and still do believe, that the strategy is not what will win
a competition. Since our robot would be a ball pusher (we didn't feel a need to have a cage--too complex), our goal
was to go for our own two balls first. We would push our own two balls straight into the scoring zone and pause
there for 5-10 seconds so that if the other robot wanted to push their 4 balls into the same scoring zone, we would
block them. Next, our robot would return to the starting position, turn and push our 4 balls straight into the other
scoring zone at the other diagonal. Once again we would pause, turn 45 degrees, and zoom to the center scoring
area and spin wildly for the rest of the game time to flick out any other balls (or robots) that happened to be
in our way.
ROBOT #1: Crabby
This was our first robot designed for competition. The basic idea was to make a tank robot. We used a 1:225 gear ratio,
4 wheel drive, and 6 motors. One motor drove each of the front wheels, and two motors drove each of the
rear wheels. We made the robot low-lying with retractable arms for the front which, if pressed against
a wall, would trigger two bump sensors. The back was a ramp so that if any robot rammed into us, it would be lifted off
the ground by our ramp (nothing intentional though!).
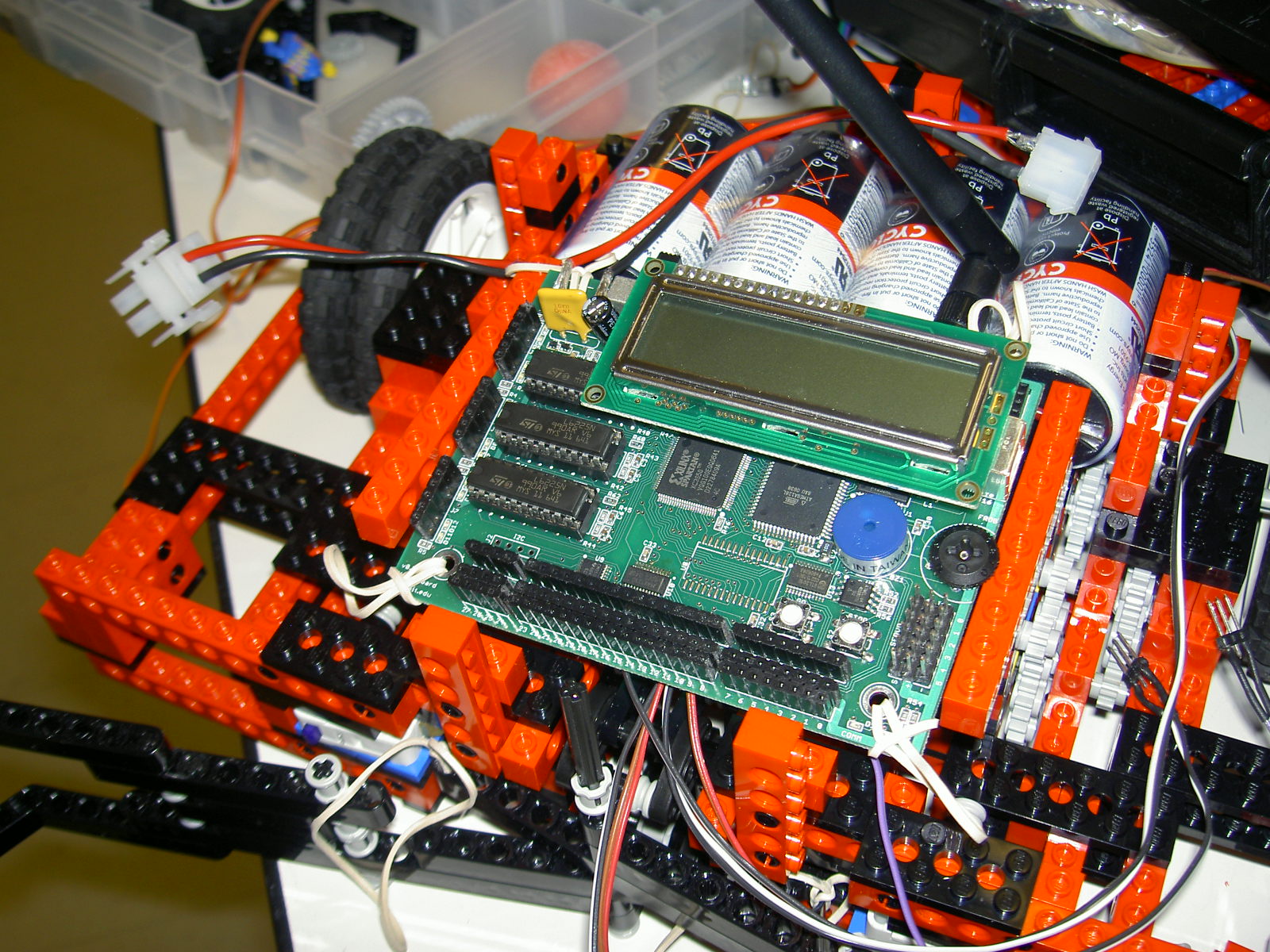
Our original robot, "Crabby".
"Crabby" took approximately a week to build and perfect. We did not use a gyro to turn as originally planned.
Instead, we had two encoders on each of the back wheels which we used to drive straight and calibrate
for turning.
Soon, we realized that with a 1:225 gear ratio, our robot was just TOO DAMN SLOW. There were also
disputes as to whether to link the front and back wheels to avoid slippage on the game board. In the end,
we rebuilt the gear train several times from 1:225 to 1:75 to 1:135 back to 1:75. We had also thought about adding a distance sensor, a RF interfacer
to detect the other robot's coordinates, but we didn't have time. Before we knew it, it was a day before impounding.
There were some major problems with our robot which surfaced several hours before the seeding rounds. For
some completely baffling reason, our robot wasn't turning correctly--the wheels would get stuck mid turn. In a fit
of frustration and panic (we needed to qualify!), we bombarded the organizers. After talking to the TA's, we
realized that our gear train was simply too long and involved. So, one hour before seeding, one day before impounding,
we tore Crabby apart. Literally:

Needless to say, we did not enter the seeding round. But it was a beautiful robot. R.I.P. Crabby.
ROBOT #2: OMG! Pirates1
Completely built and programmed in 6 hours!
OMG! Pirates1 was built after we tore apart Crabby. From 10PM to 5AM, Peak and Doug worked to build a simpler,
more effective robot. We scrapped the 4 wheel drive, and two motors. We used two wheels and two casters, two motors
to power each wheel.

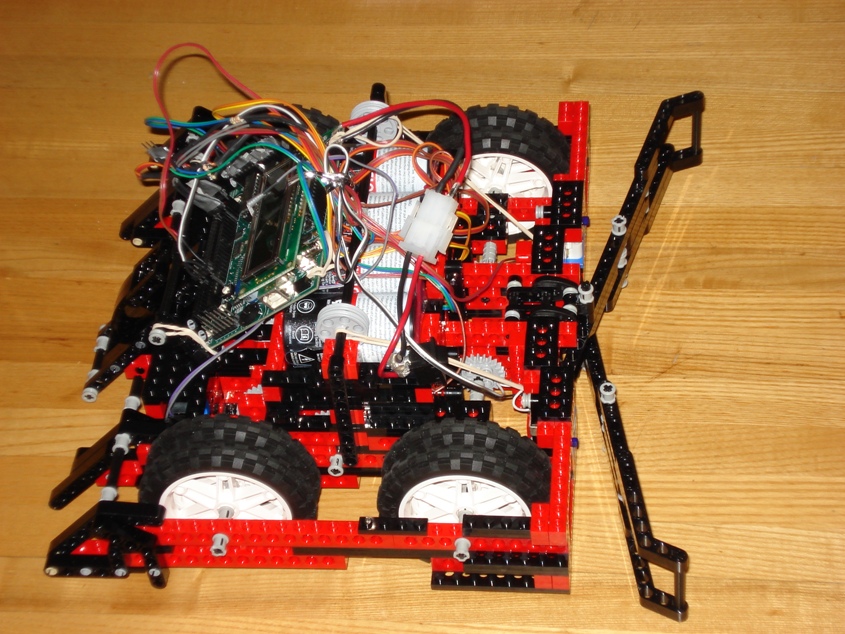
Partially built robot. At approximately 2AM.
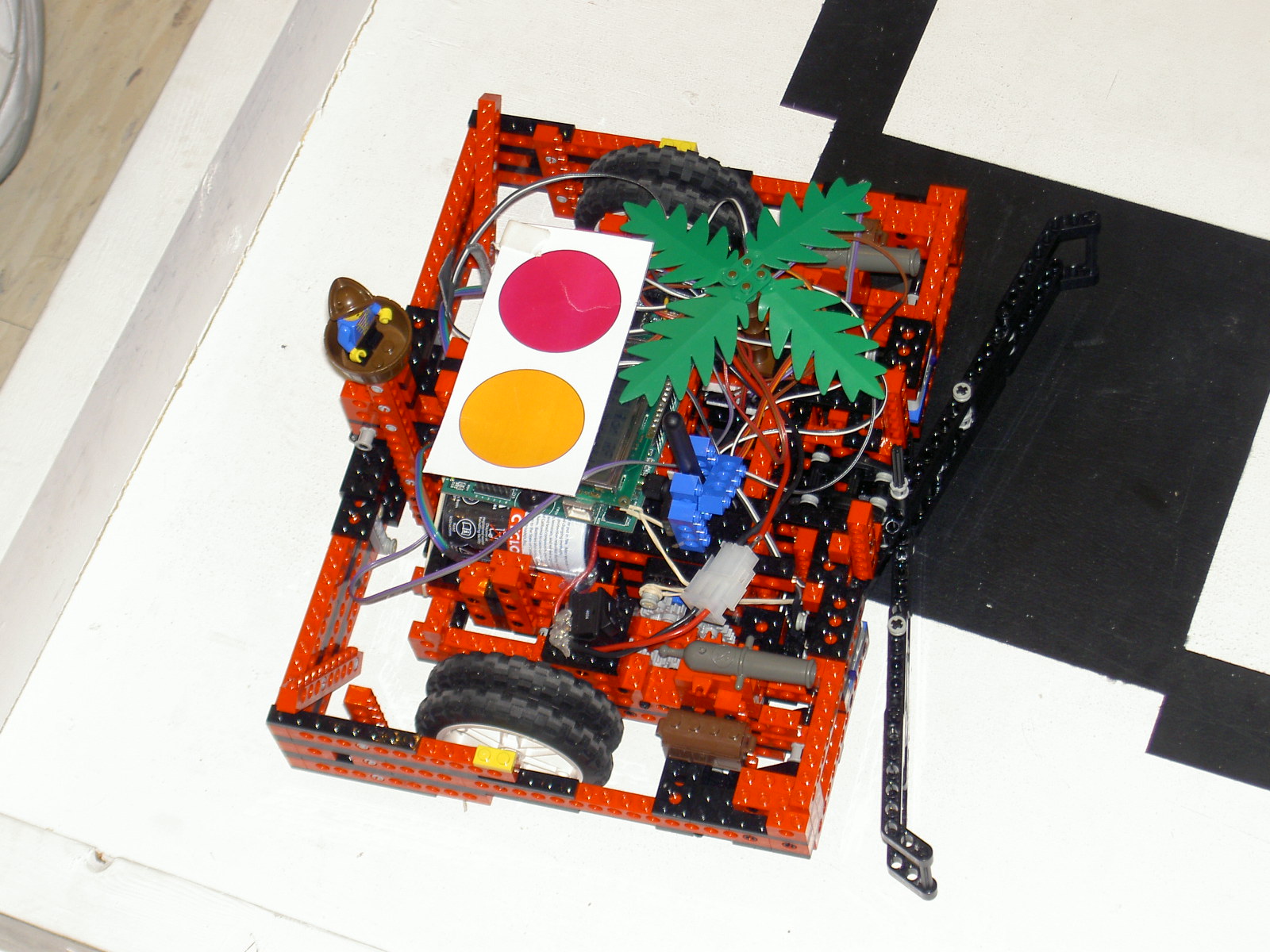
OMG! Pirates1 in competition!
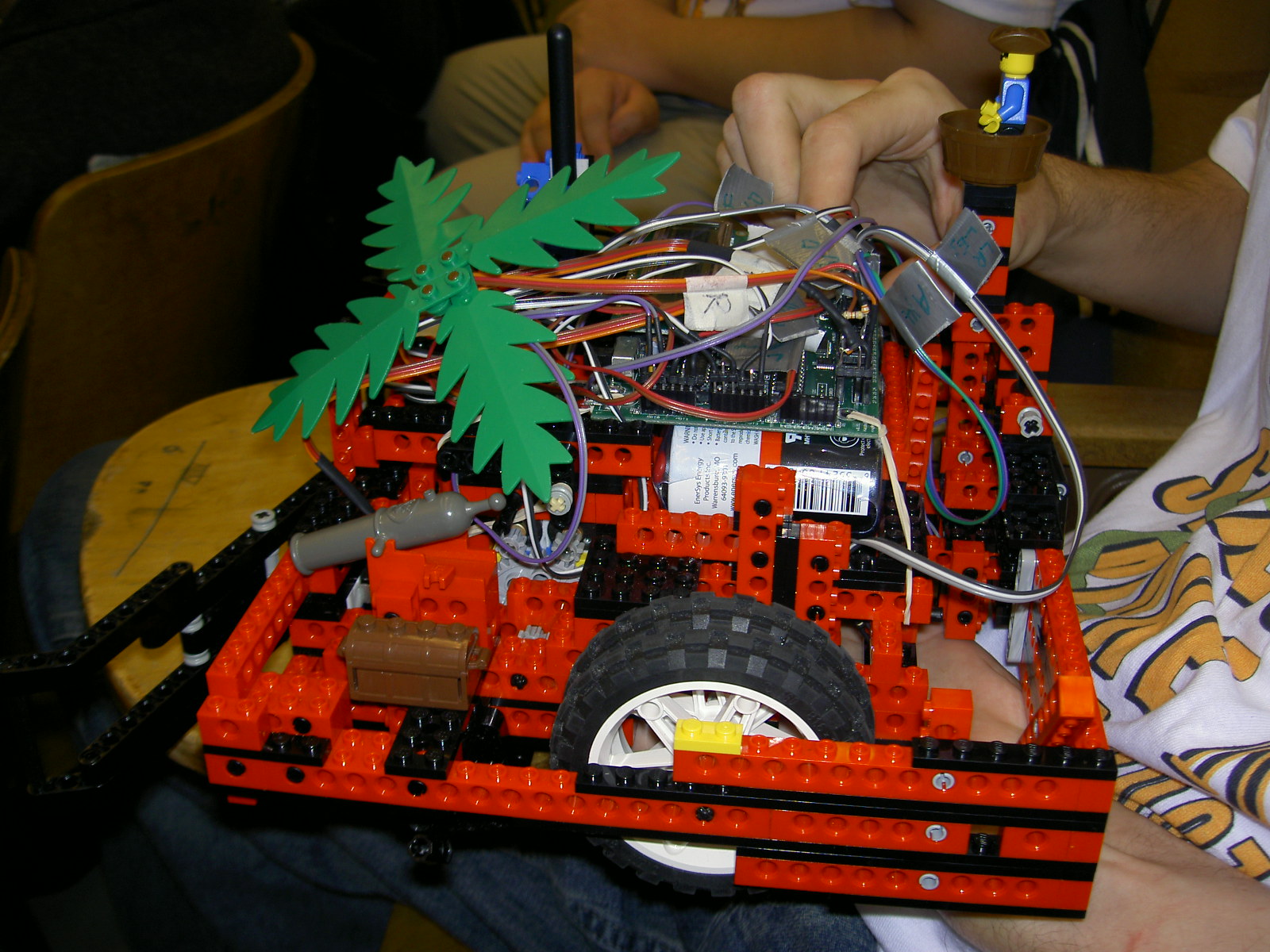
Doug holding OMG! Pirates1.
Stats:
Gear Ratio: 1:75
Motors: 4
Sensors: 9 (4 LEDs, 3 Bump Sensors, 2 Encoders)
Drive Straight: Encoders
Turning: Encoders
Gyro? Pish--No way.
|
|