|
OVERALL
Our Vision
Our robot consisted of four main parts: the Ball Sucker, the Elevator,
the Ball
Pooper, and the Drawbridge)
Ball Sucker
The balls would be propelled up a ramp as a result of the force of the
rotating
wheels sucking the balls from the board into our robot.
The Elevator
With the use of rubber bands, gears, and tires, we built a contraption that
would lift the balls to a sorter. The sorter would then lean in two different
directions depending if the balls were ours or our opponents. If the balls
were ours, then they would end up in the basket with the Ball Pooper. Else,
they would end up in the Drawbridge.
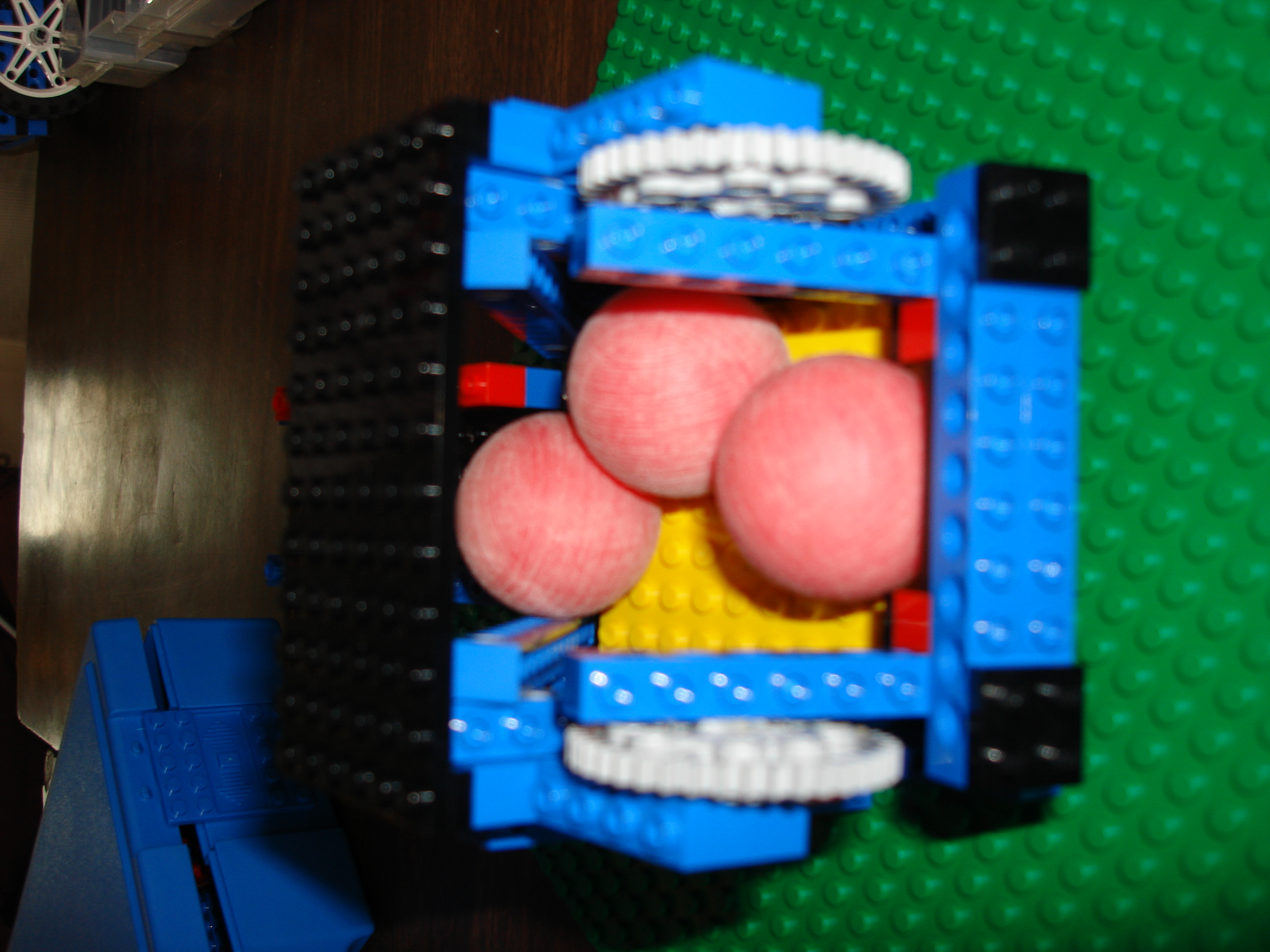
Ball Pooper
The Ball Pooper consists of a basket and two brackets (supported by
rubber bands
and a motor) that held the basket inside the robot until it was the
right time
to release it. The basket was released in one of the two corners and kept
attached to the robot by a chain. Our initial idea for the Ball Pooper was
actually an extenable arm, but this idea failed as we realized that it was too
big and took too many parts.
The Drawbridge
This device was responsible to hold the two opponent's balls and
release them at
the every end of the round once our robot had cleared the middle scoring zone
(Y). By a motor, the drawbridge would come down and let the balls roll to the
outside of the middle zone.
|